Today’s blog is written by Dr Alex Hadwen-Bennett, who we worked with to find out primary school learners’ experiences of engaging with culturally relevant Computing lessons. Alex is a Lecturer in Computing Education at King’s College London, where he undertakes research focusing on inclusive computing education and the pedagogy of making.
For this reason, a particular focus of the Raspberry Pi Foundation’s academic research programme is to support Computing teachers in the use of culturally relevant pedagogy. This pedagogy involves developing learning experiences that deliberately aim to enable all learners to engage with and succeed in Computing, including by bringing their culture and interests into the classroom.
At the beginning of this study, teachers adapted two units of work that cover digital literacy skills
Conducting the focus groups
For the focus groups, the Foundation team asked teachers from three schools to each choose four learners to take part. All children in the three focus groups had taken part in all the lessons involving the culturally adapted resources. The children were both boys and girls, and came from diverse cultural backgrounds where possible.
The questions for the focus groups were prepared in advance and covered:
Perceptions of Computing as a subject
Reflections of their experiences of the engaging with culturally adapted resources
Perceptions of who does Computing
Outcomes from the focus groups
“I feel happy that I see myself represented in some way.”
“It was nice to do something that actually represented you in many different ways, like your culture and your background.”
– Statements of learners who participated in the focus groups
When the learners were asked about what they did in their Computing lessons, most of them made references to working with and manipulating graphics; fewer made references to programming and algorithms. This emphasis on graphics is likely related to this being the most recent topic the learners engaged with. The learners were also asked about their reflections on the culturally adapted graphics unit that they had recently completed. Many of them felt that the unit gave them the freedom to incorporate things that related to their interests or culture. The learners’ responses also suggested that they felt represented in the work they completed during the unit. Most of them indicated that their interests were acknowledged, whereas fewer mentioned that they felt their cultural backgrounds were highlighted.
“Anyone can be good at computing if they have the passion to do it.”
– Statement by a learner who participated in a focus group
When considering who does computing, the learners made multiple references to people who keep trying or do not give up. Whereas only a couple of learners said that computer scientists need to be clever or intelligent to do computing. A couple of learners suggested that they believed that anyone can do computing. It is encouraging that the learners seemed to associate being good at computing with effort rather than with ability. However, it is unclear whether this is associated with the learners engaging with the culturally adapted resources.
Reflections and next steps
While this was a small-scale study, the focus groups findings do suggest that engaging with culturally adapted resources can make primary learners feel more represented in their Computing lessons. In particular, engaging with an adapted unit led learners to feel that their interests were recognised as well as, to a lesser extent, their cultural backgrounds. This suggests that primary-aged learners may identify their practical interests as the most important part of their background, and want to share this in class.
Finally, the responses of the learners suggest that they feel that perseverance is a more important quality than intelligence for success in computing and that anyone can do it. While it is not possible to say whether this is directly related to their engagement with a culturally adapted unit, it would be an interesting area for further research.
The Foundation would like to extend thanks to Cognizant for funding this research, and to the primary computing teachers and learners who participated in the project.
Underrepresentation in computing is a widely known issue, in industry and in education. To cite some statistics from the UK: a Black British Voices report from August 2023 noted that 95% of respondents believe the UK curriculum neglects black lives and experiences; fewer students from working class backgrounds study GCSE Computer Science; when they leave formal education, fewer female, BAME, and white working class people are employed in the field of computer science (Kemp 2021); only 21% of GCSE Computer Science students, 15% at A level, and 22% at undergraduate level are female (JCQ 2020, Ofqual 2020, UCAS 2020); students with additional needs are also underrepresented.
Such statistics have been the status quo for too long. Many Computing teachers already endeavour to bring about positive change where they can and engage learners by including their interests in the lessons they deliver, so how can we support them to do this more effectively? Extending the reach of computing so that it is accessible to all also means that we need to consider what formal and informal values predominate in the field of computing. What is the ‘hidden’ curriculum in computing that might be excluding some learners? Who is and who isn’t represented?
Katharine Childs (Raspberry Pi Foundation)
In a recent research seminar, Katharine Childs from our team outlined a research project we conducted, which included a professional development workshop to increase primary teachers’ awareness of and confidence in culturally relevant pedagogy. In the workshop, teachers considered how to effectively adapt curriculum materials to make them culturally relevant and engaging for the learners in their classrooms. Katharine described the practical steps teachers took to adapt two graphics-related units, and invited seminar participants to apply their learning to a graphics activity themselves.
What is culturally relevant pedagogy?
Culturally relevant pedagogy is a teaching framework which values students’ identities, backgrounds, knowledge, and ways of learning. By drawing on students’ own interests, experiences and cultural knowledge educators can increase the likelihood that the curriculum they deliver is more relevant, engaging and accessible to all.
The idea of culturally relevant pedagogy was first introduced in the US in the 1990s by African-American academic Gloria Ladson-Billings (Ladson-Billings 1995). Its aim was threefold: to raise students’ academic achievement, to develop students’ cultural competence and to promote students’ critical consciousness. The idea of culturally responsive teaching was later advanced by Geneva Gay (2000) and more recently brought into focus in US computer science education by Kimberly Scott and colleagues (2015). The approach has been localised for England by Hayley Leonard and Sue Sentance (2021) in work they undertook here at the Foundation.
Provide opportunities for open-ended and problem solving activities
Promote collaboration and structured group discussion
Promote student agency through choice
Review the learning environment
Review related policies, processes, and training in your school and department
At first glance it is easy to think that you do most of those things already, or to disregard some items as irrelevant to the computing curriculum. What would your own cultural identity (see AO2) have to do with computing, you might wonder. But taking a less complacent perspective might lead you to consider all the different facets that make up your identity and then to think about the same for the students you teach. You may discover that there are many areas which you have left untapped in your lesson planning.
Katharine explained how this is where the professional development workshop showed itself as beneficial for the participants. It gave teachers the opportunity to reflect on how their cultural identity impacted on their teaching practices — as a starting point to learning more about other aspects of the culturally relevant pedagogy approach.
Our researchers were interested in how they could work alongside teachers to adapt two computing units to make them more culturally relevant for teachers’ specific contexts. They used the Computing Curriculum units on Photo Editing (Year 4) and Vector Graphics (Year 5).
Katharine illustrated some of the adaptations teachers and researchers working together had made to the emoji activity above, and which areas of opportunity (AO) had been addressed; this aspect of the research will be reported in later publications.
Results after the workshop
Although the numbers of participants in this pilot study was small, the findings show that the professional development workshop significantly increased teachers’ awareness of culturally relevant pedagogy and their confidence in adapting resources to take account of local contexts:
After the workshop, 10/13 teachers felt more confident to adapt resources to be culturally relevant for their own contexts, and 8/13 felt more confident in adapting resources for others.
Before the workshop, 5/13 teachers strongly agreed that it was an important part of being a computing teacher to examine one’s own attitudes and beliefs about race, gender, disabilities, sexual orientation. After the workshop, the number in agreement rose to 12/13.
After the workshop, 13/13 strongly agreed that part of a computing teacher’s responsibility is to challenge teaching practices which maintain social inequities (compared to 7/13 previously).
Before the workshop, 4/13 teachers strongly agreed that it is important to allow student choice when designing computing activities; this increased to 9/13 after the workshop.
These quantitative shifts in perspective indicate a positive effect of the professional development pilot.
Katharine described that in our qualitative interviews with the participating teachers, they expressed feeling that their understanding of culturally relevant pedagogy had increased and they recognized the many benefits to learners of the approach. They valued the opportunity to discuss their contexts and to adapt materials they currently used with other teachers, because it made it a more ‘authentic’ and practical professional development experience.
The seminar ended with breakout sessions inviting viewers to consider possible adaptations that could be made to the graphics activities which had been the focus of the workshop.
In the breakout sessions, attendees also discussed specific examples of culturally relevant teaching practices that had been successful in their own classrooms, and they considered how schools and computing educational initiatives could support teachers in their efforts to integrate culturally relevant pedagogy into their practice. Some attendees observed that it was not always possible to change schemes of work without a ‘whole-school’ approach, senior leadership team support, and commitment to a research-based professional development programme.
Where do you see opportunities for your teaching?
The seminar reminds us that the education system is not culture neutral and that teachers generally transmit the dominant culture (which may be very different from their students’) in their settings (Vrieler et al, 2022). Culturally relevant pedagogy is an attempt to address the inequities and biases that exist, which result in many students feeling marginalised, disenfranchised, or underachieving. It urges us to incorporate learners’ cultures and experiences in our endeavours to create a more inclusive computing curriculum; to adopt an intersectional lens so that all can thrive.
As a pilot study, the workshop was offered to a small cohort of 13, yet the findings show that the intervention significantly increased participants’ awareness of culturally relevant pedagogy and their confidence in adapting resources to take account of local contexts.
Of course there are many ways in which teachers already adapt resources to make them interesting and accessible to their pupils. Further examples of the sort of adaptations you might make using these areas of opportunity include:
AO1: You could find out to what extent learners feel like they ‘belong’ or are included in a particular computing-related career. This is sure to yield valuable insights into learners’ knowledge and/or preconceptions of computing-related careers.
AO3: You could introduce topics such as the ethics of AI, data bias, investigations of accessibility and user interface design.
AO4: You might change the context of a unit of work on the use of conditional statements in programming, from creating a quiz about ‘Vikings’ to focus on, for example, aspects of youth culture which are more engaging to some learners such as football or computer games, or to focus on religious celebrations, which may be more meaningful to others.
AO5: You could experiment with a particular pedagogical approach to maximise the accessibility of a unit of work. For example, you could structure a programming unit by using the PRIMM model, or follow the Universal Design for Learning framework to differentiate for diversity.
AO6/7: You could offer more open-ended and collaborative activities once in a while, to promote engagement and to allow learners to express themselves autonomously.
AO8: By allowing learners to choose topics which are relevant or familiar to their individual contexts and identities, you can increase their feeling of agency.
AO9: You could review both your learning materials and your classroom to ensure that all your students are fully represented.
AO10: You can bring colleagues on board too; the whole enterprise of embedding culturally relevant pedagogy will be more successful when school- as well as department-level policies are reviewed and prioritised.
Can you see an opportunity for integrating culturally relevant pedagogy in your classroom? We would love to hear about examples of culturally relevant teaching practices that you have found successful. Let us know your thoughts or questions in the comments below.
To get a practical overview of culturally relevant pedagogy, read our 2-page Quick Read on the topic and download the guidelines we created with a group of teachers and academic specialists.
Tomorrow we’ll be sharing a blog about how the learners who engaged with the culturally adapted units found the experience, and how it affected their views of computing. Follow us on social media to not miss it!
Join our upcoming seminars live
On 12 December we’ll host the last seminar session in our series on primary (K-5) computing. Anaclara Gerosa will share her work on how to design and structure early computing activities that promote and scaffold students’ conceptual understanding. As always, the seminar is free and takes place online at 17:00–18:30 GMT / 12:00–13:30 ET / 9:00–10:30 PT / 18:00–19:30 CET. Sign up and we’ll send you the link to join on the day.
We partner with organisations around the world to bring coding activities to young people in their regions through Code Club and CoderDojo. Currently involving 54 organisations in 43 countries, this Global Clubs Partner network shares our passion for educating kids to create with technology.
We work to connect our Global Clubs Partners to foster a sense of community and encourage collaboration. As part of this, we run in-person meetups to allow our partners to get to know each other better, and to help us understand how we can best support them, and what we can learn from them. Previously held in Penang, Malaysia, and Almere, the Netherlands, our latest meetup took place in Cape Town, South Africa.
Connecting through stories and experiences
Although we’ve seen some surprising points of commonality among all Global Clubs Partners, we also know that our partners find it helpful to connect with organisations based in their region. For the Cape Town meetup, we invited partner organisations from across Africa, hoping to bring together as many people as possible.
Our aim was to give our partners the opportunity to share their work and identify and discuss common questions and issues. We also wanted to mitigate some of the challenges of working internationally, such as time constraints, time zones, and internet connectivity, so that everyone could focus on connecting with each other.
The meetup agenda included time for each Global Clubs Partner organisation to present their work and future plans, as well as time for discussions on growing and sustaining club volunteer and mentor communities, strategy for 2024, and sharing resources.
“If the only thing rural communities have is problems, why are people still living there? … Rural communities have gifts, have skills, they have history that is wasting away right now; nobody is capturing it. They have wisdom and assets.”
Damilola Fasoranti from Prikkle Academy, Nigeria, talking about not making assumptions about rural communities and how this shapes the work his organisation does
A group dinner after the meetup enabled more informal networking. The next day, everyone had the chance to get inspired at Coolest Projects South Africa, a regional Coolest Projects event for young tech creators organised by partner organisation Coder LevelUp.
The meetup gave the Global Clubs Partners time to talk to each other about their work and experiences and understand one another better. It was also very beneficial for our team: we learned more about how we can best support partners to work in their communities, whether through new resources, information about funding applications, or best practice in overcoming challenges.
Building bridges
After attending a previous meetup, two of our partner organisations had decided to create an agreement for future partnership. We were delighted to learn about this collaboration, and to witness the signing of the agreement at this meetup.
By continuing to bring our partner network together, we hope to foster more cross-organisation partnerships like this around the world that will strengthen the global movement for democratising computing education.
Could your organisation become a Global Clubs Partner?
You can find out how your organisation could join our Global Clubs Partner network on the CoderDojo and Code Club websites, or contact us directly with your questions or ideas about a partnership.
Google DeepMind’s Aimee Welch discusses our partnership on the Experience AI learning programme and why equal access to AI education is key. This article also appears in issue 22 of Hello World on teaching and AI.
From AI chatbots to self-driving cars, artificial intelligence (AI) is here and rapidly transforming our world. It holds the potential to solve some of the biggest challenges humanity faces today — but it also has many serious risks and inherent challenges, like reinforcing existing patterns of bias or “hallucinating”, a term that describes AI making up false outputs that do not reflect real events or data.
Young people need the knowledge and skills to navigate and shape AI.
Teachers want to build young people’s AI literacy
As AI becomes an integral part of our daily lives, it’s essential that younger generations gain the knowledge and skills to navigate and shape this technology. Young people who have a foundational understanding of AI are able to make more informed decisions about using AI applications in their daily lives, helping ensure safe and responsible use of the technology. This has been recognised for example by the UK government’s AI Council, whose AI Roadmap sets out the goal of ensuring that every child in the UK leaves school with a basic sense of how AI works.
Every young person should have access to learning AI literacy.
But while AI literacy is a key skill in this new era, not every young person currently has access to sufficient AI education and resources. In a recent survey by the EdWeek Research Center in the USA, only one in 10 teachers said they knew enough about AI to teach its basics, and very few reported receiving any professional development related to the topic. Similarly, our work with the Raspberry Pi Computing Education Research Centre has suggested that UK-based teachers are eager to understand more about AI and how to engage their students in the topic.
Bringing AI education into classrooms
Ensuring broad access to AI education is also important to improve diversity in the field of AI to ensure safe and responsible development of the technology. There are currently stark disparities in the field and these start already early on, with school-level barriers contributing to underrepresentation of certain groups of people. By increasing diversity in AI, we bring diverse values, hopes, and concerns into the design and deployment of the technology — something that’s critical for AI to benefit everyone.
Bringing diverse values into AI is critical.
By focusing on AI education from a young age, there is an opportunity to break down some of these long-standing barriers. That’s why we partnered with the Raspberry Pi Foundation to co-create Experience AI, a new learning programme with free lesson plans, slide decks, worksheets and videos, to address gaps in AI education and support teachers in engaging and inspiring young people in the subject.
The programme aims to help young people aged 11–14 take their first steps in understanding the technology, making it relevant to diverse learners, and encouraging future careers in the field. All Experience AI resources are freely available to every school across the UK and beyond.
The Experience AI resources are free for every school.
The partnership is built on a shared vision to make AI education more inclusive and accessible. Bringing together the Foundation’s expertise in computing education and our cutting-edge technical knowledge and industry insights has allowed us to create a holistic learning experience that connects theoretical concepts and practical applications.
Experience AI: Informed by AI experts
A group of 15 research scientists and engineers at Google DeepMind contributed to the development of the lessons. From drafting definitions for key concepts, to brainstorming interesting research areas to highlight, and even featuring in the videos included in the lessons, the group played a key role in shaping the programme in close collaboration with the Foundation’s educators and education researchers.
Interviews with AI scientists and engineers at Google DeepMind are part of Experience AI.
To bring AI concepts to life, the lessons include interactive activities as well as real-life examples, such as a project where Google DeepMind collaborated with ecologists and conservationists to develop machine learning methods to study the behaviour of an entire animal community in the Serengeti National Park and Grumeti Reserve in Tanzania.
One of the Experience AI lessons focuses on an AI-enabled research project in the Serengeti.
Member of the working group, Google DeepMind Research Scientist Petar Veličković, shares: “AI is a technology that is going to impact us all, and therefore educating young people on how to interact with this technology is likely going to be a core part of school education going forward. The project was eye-opening and humbling for me, as I learned of the challenges associated with making such a complex topic accessible — not only to every pupil, but also to every teacher! Observing the thoughtful approach undertaken by the Raspberry Pi Foundation left me deeply impressed, and I’m taking home many useful ideas that I hope to incorporate in my own AI teaching efforts going forward.”
The lessons have been carefully developed to:
Follow a clear learning journey, underpinned by the SEAME framework which guides learners sequentially through key concepts and acts as a progression framework.
Build foundational knowledge and provide support for teachers. Focus on teacher training and support is at the core of the programme.
Embed ethics and responsibility. Crucially, key concepts in AI ethics and responsibility are woven into each lesson and progressively built on.Students are introduced to concepts like data bias, user-focused approaches, model cards, and how AI can be used for social good.
Ensure cultural relevance and inclusion. Experience AI was designed with diverse learners in mind and includes a variety of activities to enable young people to pick topics that most interest them.
What teachers say about the Experience AI lessons
To date, we estimate the resources have reached 200,000+ students in the UK and beyond. We’re thrilled to hear from teachers already using the resources about the impact they are having in the classroom, such as Mrs J Green from Waldegrave School in London, who says: “I thought that the lessons covered a really important topic. Giving the pupils an understanding of what AI is and how it works will become increasingly important as it becomes more ubiquitous in all areas of society. The lessons that we trialled took some of the ‘magic’ out of AI and started to give the students an understanding that AI is only as good as the data that is used to build it. It also started some really interesting discussions with the students around areas such as bias.”
Experience AI offers support for teachers.
At North Liverpool Academy, teacher Dave Cross tells us: “AI is such a current and relevant topic in society that [these lessons] will enable Key Stage 3 computing students [ages 11–14] to gain a solid foundation in something that will become more prevalent within the curriculum, and wider subjects too as more sectors adopt AI and machine learning as standard. Our Key Stage 3 computing students now feel immensely more knowledgeable about the importance and place that AI has in their wider lives. These lessons and activities are engaging and accessible to students and educators alike, whatever their specialism may be.”
A stronger global AI community
Our hope is that the Experience AI programme instils confidence in both teachers and students, helping to address some of the critical school-level barriers leading to underrepresentation in AI and playing a role in building a stronger, more inclusive AI community where everyone can participate irrespective of their background.
Today’s young people are tomorrow’s leaders — and as such, educating and inspiring them about AI is valuable for everybody.
Teachers can visit experience-ai.org to download all Experience AI resources for free.
We are now building a network of educational organisations around the world to tailor and translate the Experience AI resources so that more teachers and students can engage with them and learn key AI literacy skills. Find out more.
How do you best teach programming in school? It’s one of the core questions for primary and secondary computing teachers. That’s why we’re making it the focus of our free online seminars in 2024. You’re invited to attend and hear about the newest research about the teaching and learning of programming, with or without AI tools.
Building on the success and the friendly, accessible session format of our previous seminars, this coming year we will delve into the latest trends and innovative approaches to programming education in school.
Our online seminars are for everyone interested in computing education
Our monthly online seminars are not only for computing educators but also for everyone else who is passionate about teaching young people to program computers. The seminar participants are a diverse community of teachers, technology enthusiasts, industry professionals, coding club volunteers, and researchers.
With the seminars we aim to bridge the gap between the newest research and practical teaching. Whether you are an educator in a traditional classroom setting or a mentor guiding learners in a CoderDojo or Code Club, you will gain insights from leading researchers about how school-age learners engage with programming.
What to expect from the seminars
Each online seminar begins with an expert presenter delivering their latest research findings in an accessible way. We then move into small groups to encourage discussion and idea exchange. Finally, we come back together for a Q&A session with the presenter.
Here’s what attendees had to say about our previous seminars:
“As a first-time attendee of your seminars, I was impressed by the welcoming atmosphere.”
“[…] several seminars (including this one) provided valuable insights into different approaches to teaching computing and technology.”
“I plan to use what I have learned in the creation of curriculum […] and will pass on what I learned to my team.”
“I enjoyed the fact that there were people from different countries and we had a chance to see what happens elsewhere and how that may be similar and different to what we do here.”
January seminar: AI-generated Parson’s Problems
Computing teachers know that, for some students, learning about the syntax of programming languages is very challenging. Working through Parson’s Problem activities can be a way for students to learn to make sense of the order of lines of code and how syntax is organised. But for teachers it can be hard to precisely diagnose their students’ misunderstandings, which in turn makes it hard to create activities that address these misunderstandings.
At our first 2024 seminar on 9 January, Dr Barbara Ericson and Xinying Hou (University of Michigan) will present a promising new approach to helping teachers solve this difficulty. In one of their studies, they combined Parsons Problems and generative AI to create targeted activities for students based on the errors students had made in previous tasks. Thus they were able to provide personalised activities that directly addressed gaps in the students’ learning.
Sign up now to join our seminars
All our seminars start at 17:00 UK time (18:00 CET / 12:00 noon ET / 9:00 PT) and are held online on Zoom. To ensure you don’t miss out, sign up now to receive calendar invitations, and access links for each seminar on the day.
Big news for young tech creators: Coolest Projects will return in 2024. The world’s leading showcase for young creators of digital tech will be open for registration in the online gallery, and we want young people worldwide to showcase their tech projects.
In 2024, we are hosting the Coolest Projects online showcase and livestream celebration for all young creators around the world, and also in-person events in the UK and Ireland for young creators who live there.
Key dates for Coolest Projects 2024
All young tech creators can take part — for free — in the Coolest Projects online showcase:
Registration opens: 14 February 2024
Registration closes: 22 May 2024
Celebratory livestream with announcement of the judges’ favourite projects: 26 June 2024
How does Coolest Projects work?
Coolest Projects is an opportunity for young tech creators to share what they have made with the world. Young people register their tech creations to show them in the Coolest Projects online showcase gallery. Alongside mentors, parents, friends, and family members in their local and global communities, they can explore the gallery and celebrate what they and their peers have made.
Who can take part?
Coolest Projects is open to all tech creators up to age 18
Tech creators of all experience levels are encouraged to participate
Creators can take part individually or in teams of up to five
Creators can live in any place in the world
Participation is free
What kinds of tech projects can be part of Coolest Projects?
All projects are welcome, whether they are beginner, advanced, or something in between
Projects can be registered in six categories: Scratch, games, web, mobile apps, hardware, and advanced programming
We love to see works in progress, so projects don’t need to be completed to be registered
Creators can choose a topic for their project, for example community, environment, health, fun, art, education, or identity
What happens after registration?
The online gallery is open for young tech creators to explore to see what their peers all over the world have made
Judges evaluate projects based on their coolness, complexity, design, usability, and presentation, and give feedback to creators about their projects
Judges pick some of their favourite projects to highlight, and every participant gets a unique certificate and some fun digital swag
Participants and the whole global Coolest Projects community celebrates young tech creators’ ingenuity on our livestream on 26 June
How can young people get started with their projects?
If your kids want to learn about creating with technology, check out our free guided coding project paths. These paths are designed to support all young people to learn how to make their own tech projects and develop their coding skills. For example:
For young people who are completely new to coding, our Introduction to Scratch path is a great place to start
If young people would like to create their own website, for example to share information about a cause they care about, they can follow our Intro to web path
The Introduction to Unity path is perfect for more experienced creators who are keen to build interactive 3D worlds
Coolest Projects in-person events: Ireland and the UK
If you are a young creator in Northern Ireland, the Republic of Ireland, or the UK, then Coolest Projects is also coming to you in person in 2024. Participants will be able to meet other young tech creators, connect to their community, and celebrate each other’s creations. Young people are encouraged to take part in both the Coolest Projects global online showcase and their local in-person event.
Coolest Projects Ireland
Registration opens: 31 January 2024
Registration closes: 20 March 2024
Event day: 13 April 2024
Coolest Projects Ireland 2023
Coolest Projects Ireland will take place at DCU St Patrick’s College Campus, Drumcondra in Dublin. It’s open to young creators in Northern Ireland and the Republic of Ireland, and their families and friends are invited to come along to celebrate them and see all the incredible projects on show. Participants can apply for partial bursaries for the costs of attending the event.
Coolest Projects UK
Very soon we will announce the date and venue for Coolest Projects UK for all young creators in the UK. Sign up for email updates to be the first to hear about it. We will also share full details of each in-person event on the Coolest Projects website when registration opens.
If you live in another country…
If there’s not an in-person Coolest Projects event near you, you can still join in the fun: the Coolest Projects online showcase is open to any young creator aged up to 18, from anywhere in the world. We also work with brilliant partner organisations around the world to bring Coolest Projects events to their countries and communities. Sign up to the Coolest Projects newsletter to be the first to know about any in-person event in your country.
What’s next?
Coolest Projects registration opens soon in 2024, and young creators can start thinking of ideas and working on their projects now. Or if young people have already made something they are really proud of, they can showcase that creation once registration is open.
Sign up for email updates to always get the latest news about all things Coolest Projects, from event updates to the fun swag coming for 2024.
Since launching our free online courses about computing on the edX platform back in August, we’ve been training course facilitators and analysing the needs of educators around the world. We want every course participant to have a great experience learning with us — read on to find out what we’re doing right now and into 2024 to ensure this.
Online courses for all adults who support young people
Educators of all kinds are key for supporting children and young people to engage with computing technology and develop digital skills. You might be a professional teacher, or a parent, volunteer, youth worker, librarian… there are so many roles in which people share knowledge with young learners.
That’s why our online courses are designed to support any kind of educator to:
Understand the full breadth of topics within computing
Discover how to introduce computing to young people in clear and exciting ways that are grounded in the latest research
We are constantly improving our online courses based on your feedback, the latest education research, and the insights our team members gain through supporting you on your course learning journeys. Three principles guide these improvements: accessibility, scalability, and sustainability.
Making our courses more relevant and accessible
Our online courses are used by people who live around the world and bring various knowledge and experiences. Some participants are classroom teachers, others have computing experience from their job and want to volunteer at a kids’ coding club, and some may be parents who want to support their children. It’s important to us that our courses are relevant and accessible to all kinds of adult learners.
We’re currently working to:
Simplify the English in the courses for participants who speak it as a second language
Adapt the course activities for specific settings where participants help young people learn so that e.g. teachers see how the activities work in the classroom, and volunteers who run coding clubs see how they work in club sessions
Ensure our course facilitators have experience in a range of different settings including coding clubs, and in a variety of different contexts around the world
Making our courses useful for more groups of people
When we think about the scalability of our courses, we think about how to best support as many educators around the world as possible. If we can make the jobs of all educators easier, whatever their setting is like, then we are making the right choices.
We’re currently working to:
Talk with the global network of educators we’re a part of to better understand what works for them so we can reflect that in the courses
Include a wider range of examples for settings beyond the classroom in the courses
Adapt our courses so they are relevant to participants with various needs while sustaining the high quality of the overall learning experience
Making the learning from our courses sustainable
The educators who take our courses work to achieve amazing things, and this means they are often busy. That they take the time to complete one of our courses to learn new things is a commitment we want to make sure is rewarded. The learning you get from participating in our online courses should continue to benefit you far beyond the time you spend completing it. This is what we mean by sustainability.
We’re currently working to:
Lay out clear learning pathways so you can build on the knowledge you gain in one course in the next course
Offer course resources that are easy to access after you’ve completed the course
Explore ways to build communities around our courses where you can share successes and learning outcomes with your fellow participants
Learn with us, and help us design better courses for you
Our work to improve the accessibility, scalability, and sustainability of our courses will continue into 2024, and these three principles will likely be part of our online training strategy for the following year too.
If you’d like to support young people in your life to learn about computing and digital technologies, take one of our free courses now and learn something new. We have twenty courses available right now and they are totally free.
We are also looking for adult testers for new course content. So if you’re any kind of educator and would like to test upcoming online course content and share your feedback and experiences, please send us a message with the subject ‘Educator training’.
We all know that learning to program, and specifically learning how to debug or fix code, can be frustrating and leave beginners overwhelmed and disheartened. In a recent blog article, our PhD student Lauria at the Raspberry Pi Computing Education Research Centre highlighted the pivotal role that teachers play in shaping students’ attitudes towards debugging. But what about teachers who are coding novices themselves?
In many countries, primary school teachers are holistic educators and often find themselves teaching computing despite having little or no experience in the field. In a recent seminar of our series on computing education for primary-aged children, Luisa Greifenstein told attendees that struggling with debugging and negative attitudes towards programming were among the top ten challenges mentioned by teachers.
Luisa is a researcher at the University of Passau, Germany, and has been working closely with both teacher trainees and experienced primary school teachers in Germany. She’s found that giving feedback to students can be difficult for primary school teachers, and especially for teacher trainees, as programming is still new to them. Luisa’s seminar introduced a tool to help.
A unique approach: Visualising debugging with LitterBox
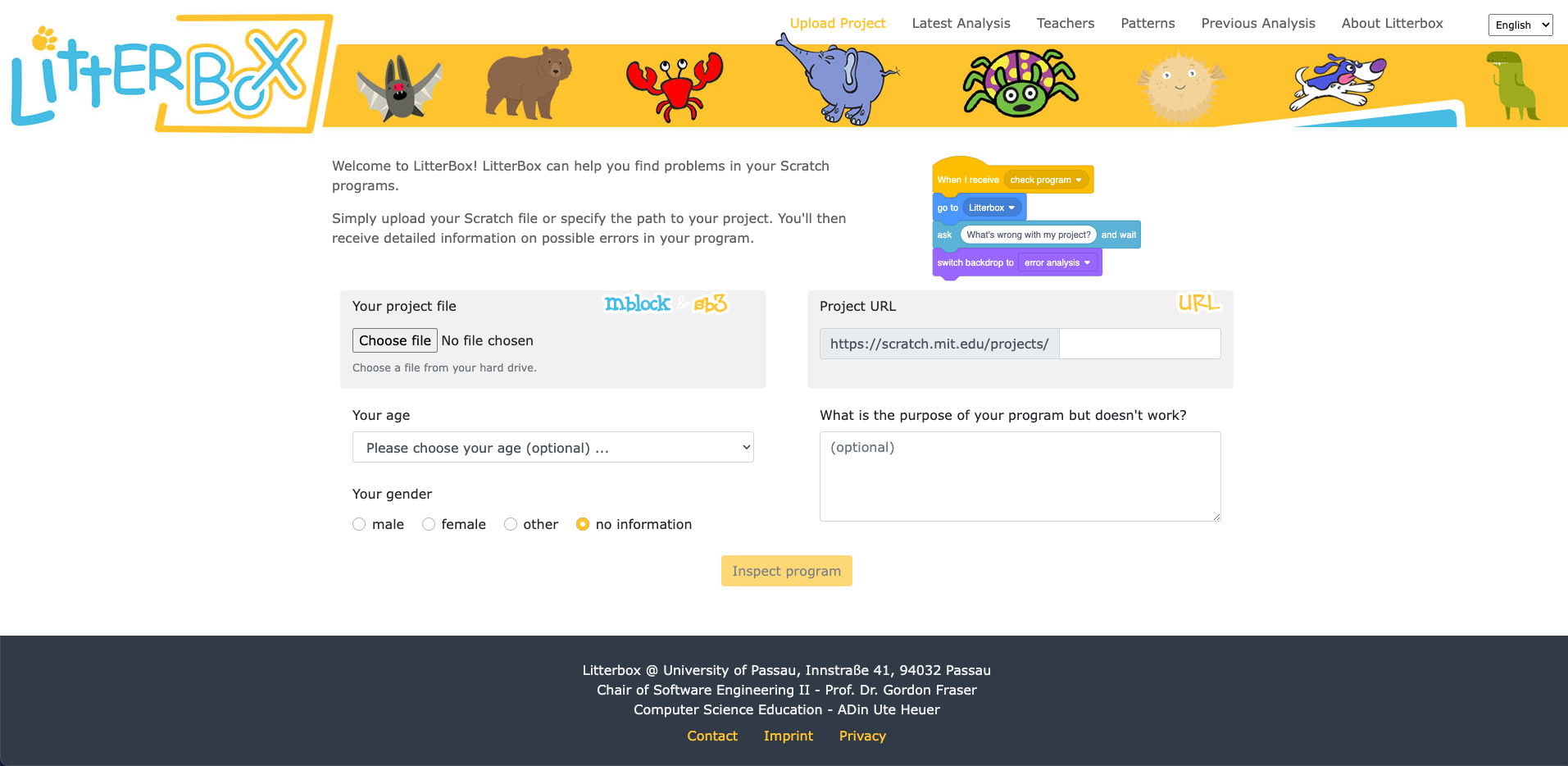
To address this issue, the University of Passau has initiated the primary::programming project. One of its flagship tools, LitterBox, offers a unique solution to debugging and is specifically designed for Scratch, a beginners’ programming language widely used in primary schools.
You can upload Scratch program files to LitterBox to analyse them. Click to enlarge.
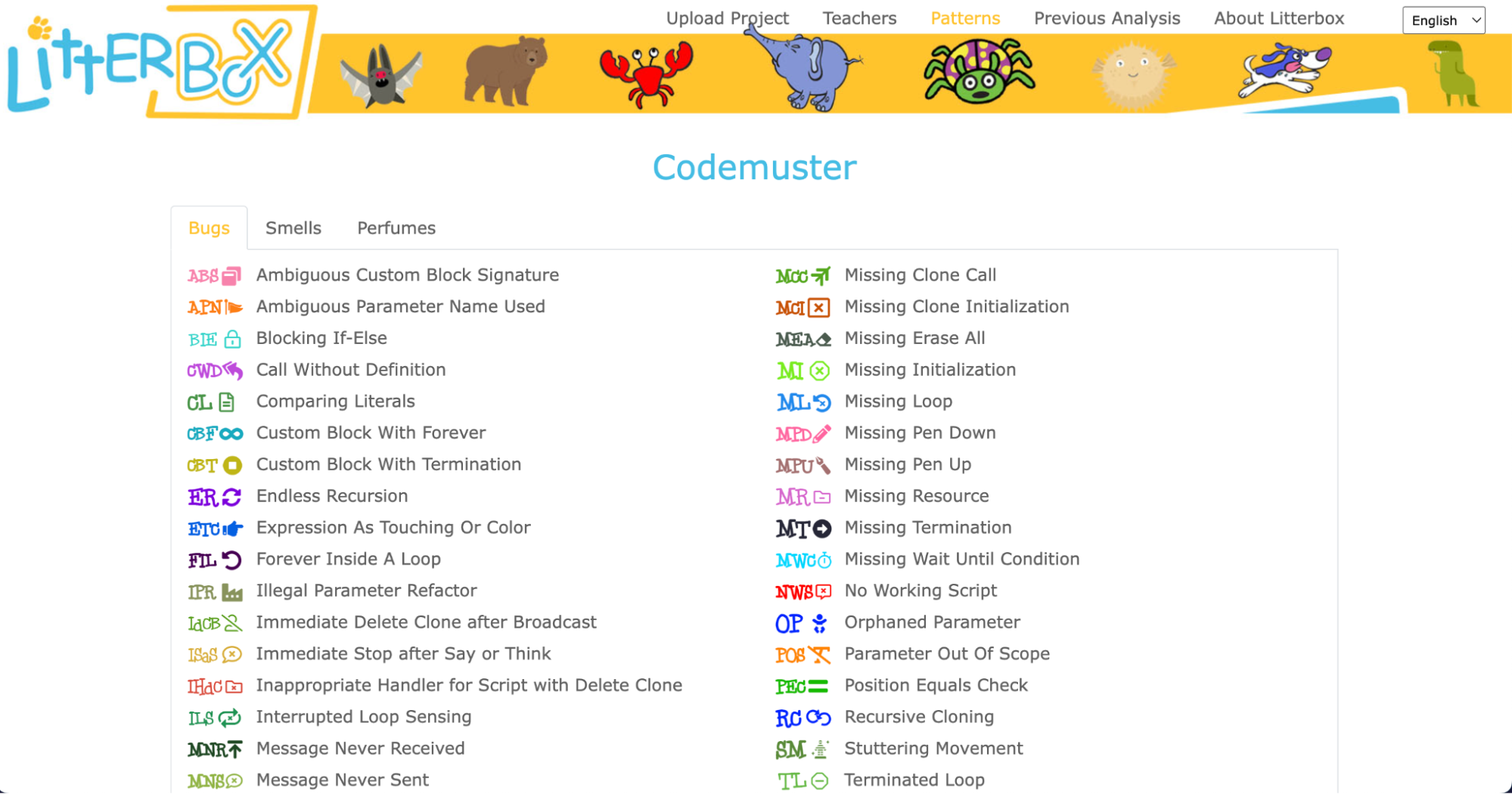
LitterBox serves as a static code debugging tool that transforms code examination into an engaging experience. With a nod to the Scratch cat, the tool visualises the debugging of Scratch code as checking the ‘litterbox’, categorising issues into ‘bugs’ and ‘smells’:
Bugs represent code patterns that have gone wrong, such as missing loops or specific blocks
Smells indicate that the code couldn’t be processed correctly because of duplications or unnecessary elements
The code patterns LitterBox recognises. Click to enlarge.
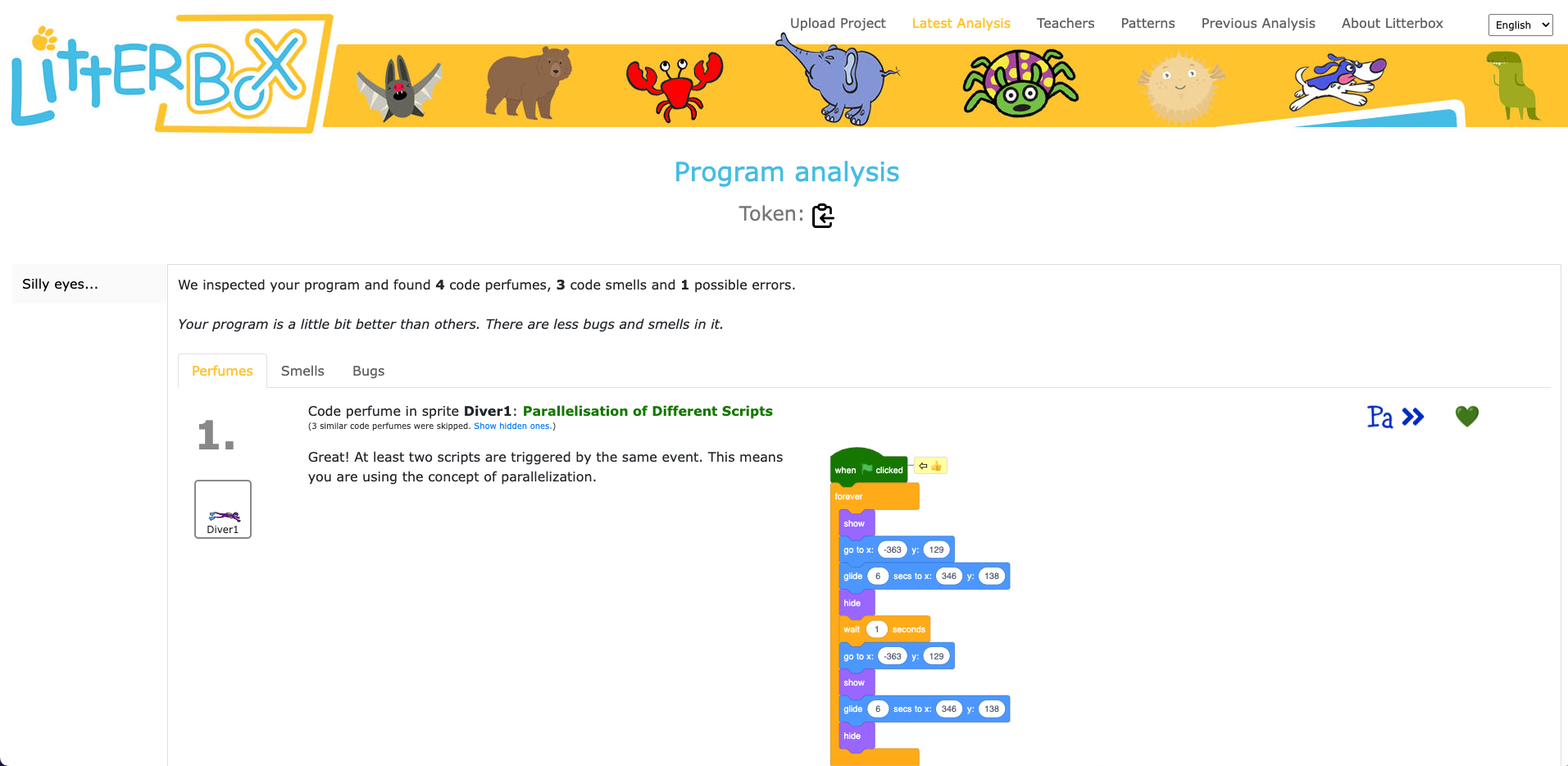
What sets LitterBox apart is that it also rewards correct code by displaying ‘perfumes’. For instance, it will praise correct broadcasting or the use of custom blocks. For every identified problem or achievement, the tool provides short and direct feedback.
LitterBox also identifies good programming practice. Click to enlarge.
Luisa and her team conducted a study to gauge the effectiveness of LitterBox. In the study, teachers were given fictitious student code with bugs and were asked to first debug the code themselves and then explain in a manner appropriate to a student how to do the debugging.
The results were promising: teachers using LitterBox outperformed a control group with no access to the tool. However, the team also found that not all hints proved equally helpful. When hints lacked direct relevance to the code at hand, teachers found them confusing, which highlighted the importance of refining the tool’s feedback mechanisms.
Despite its limitations, LitterBox proved helpful in another important aspect of the teachers’ work: coding task creation. Novice students require structured tasks and help sheets when learning to code, and teachers often invest substantial time in developing these resources. While LitterBox does not guide educators in generating new tasks or adapting them to their students’ needs, in a second study conducted by Luisa’s team, teachers who had access to LitterBox not only received support in debugging their own code but also provided more scaffolding in task instructions they created for their students compared to teachers without LitterBox.
How to maximise the impact of new tools: use existing frameworks and materials
One important realisation that we had in the Q&A phase of Luisa’s seminar was that many different research teams are working on solutions for similar challenges, and that the impact of this research can be maximised by integrating new findings and resources. For instance, what the LitterBox tool cannot offer could be filled by:
Pedagogical frameworks to enhance teachers’ lessons and feedback structures. Frameworks such as PRIMM (Predict, Run, Investigate, Modify, and Make) or TIPP&SEE for Scratch projects (Title, Instructions, Purpose, Play & Sprites, Events, Explore) can serve as valuable resources. These frameworks provide a structured approach to lesson design and teaching methodologies, making it easier for teachers to create engaging and effective programming tasks. Additionally, by adopting semantic waves in the feedback for teachers and students, a deeper understanding of programming concepts can be fostered.
Existing courses and materials to aid task creation and adaptation. Our expert educators at the Raspberry Pi Foundation have not only created free lesson plans and courses for teachers and educators, but also dedicated non-formal learning paths for Scratch, Python, Unity, web design, and physical computing that can serve as a starting point for classroom tasks.
Exploring innovative ideas in computing education
As we navigate the evolving landscape of programming education, it’s clear that innovative tools like LitterBox can make a significant difference in the journey of both educators and students. By equipping educators with effective debugging and task creation solutions, we can create a more positive and engaging learning experience for students.
If you’re an educator, consider exploring how such tools can enhance your teaching and empower your students in their coding endeavours.
You can watch the recording of Luisa’s seminar here:
Sign up now to join our next seminar
If you’re interested in the latest developments in computing education, join us at one of our free, monthly seminars. In these sessions, researchers from all over the world share their innovative ideas and are eager to discuss them with educators and students. In our December seminar, Anaclara Gerosa (University of Edinburgh) will share her findings about how to design and structure early-years computing activities.
This will be the final seminar in our series about primary computing education. Look out for news about the theme of our 2024 seminar series, which are coming soon.
In our series of community stories, we celebrate some of the amazing young people and educators who are using their passion for technology to create positive change in the world around them.
In our latest story, we’re sharing the inspiring journey of St Joseph’s Secondary School in Rush, Ireland. Over the past few years, the school community has come together to encourage coding and digital skills, harnessing the European Astro Pi Challenge as an opportunity to kindle students’ enthusiasm for tech and teamwork.
We caught up with some of the educators and students at St Joseph’s, fresh off the success of their participation in another round of Astro Pi, to delve a little deeper into the school’s focus on making opportunities to engage with computing technologies accessible to all.
Introducing St Joseph’s Secondary School
St Joseph’s Secondary School is in the heart of Rush, a rural town steeped in agricultural heritage. The school houses a diverse student population coming from the local multigenerational farming families as well as families who’ve been drawn to Rush more recently by its beautiful countryside and employment opportunities. St Joseph’s leadership team has responded to the changing demographics and increase of its student population by adapting and growing the school’s curriculum to meet the evolving needs of the young people and help them build a strong community.
Working as teams for the Astro Pi Challenge has helped the St Joseph’s students connect and support each other as a community.
One of the school’s most popular initiatives has been teaching coding from first year (ages 12–13). This proactive approach has resonated with many students, including Kamaya, a member of the school’s 2022/23 Astro Pi cohort, who first discovered her passion for space science and computing through the movie Interstellar.
I remember the first time I was like, ‘OK, space is cool’ is when I watched a movie. It was called Interstellar. I [realised] I might want to do something like that in my future. So, when I came to [St Joseph’s] secondary school, I saw coding as a subject and I was like, ‘Mum, I’ve got to do coding.’
Kamaya, student at St Joseph’s
Inspiring students to build community through Astro Pi
A key person encouraging St Joseph’s students to give coding a try has been Mr Murray, or Danny as he is fondly referred to by students and staff alike. Danny was introduced to the importance of engaging with computing technologies while teaching science at a school in England: he attended a Code Club where he saw kids building projects with Raspberry Pis, and he couldn’t wait to get involved. Growing his knowledge from there, Danny changed subject focus when he moved back to Ireland. He took on the challenge of helping St Joseph’s expand their computer science offering, along with leading on all IT-related issues.
Teacher Danny Murray has used his enthusiasm to help shape a culture of digital skills at St Joseph’s.
When the school introduced mandatory coding taster sessions for all first-year students, Danny was blown away by the students’ eagerness and wanted to provide further opportunities for them to see what they could achieve with digital technologies.
This is where Astro Pi came in. After hearing about this exciting coding challenge through an acquaintance, Danny introduced it to his computer science class, as well as extending an open invitation to all St Joseph’s students. The uptake was vast, especially once he shared that the young people could become the recipients of some very exciting photos.
You get to see photos of Earth that nobody has ever seen. Imagine just talking to somebody and saying, ‘Oh, there’s a picture of the Amazon. I took that picture when I was 14. From space.’
Danny Murray, computing teacher at St Joseph’s
Danny’s mission is to instil in his students the belief that they can achieve anything. Collaborating on Astro Pi projects has enabled young people at St Joseph’s to team up and uncover their strengths, and has helped foster a strong community.
A culture of digital skills
The students’ sense of community has transcended Danny’s classroom, creating a culture of enthusiasm for digital skills at St Joseph’s. Today, a dedicated team of students is in charge of solving tech-related challenges within the school, as Deputy Principal Darren Byrne explains:
Our own students actually go class to class, repairing tech issues. So, every day there are four or five students going around checking PCs in classrooms. They […] give classes to our first-year students on app usage. It’s invested in the whole school [now], the idea that students can look after this kind of technology themselves. We’re the ones reaching out for help from the students!
Darren Byrne, Deputy Principal at St Joseph’s
Spark enthusiasm in your school community
To find out how you can get involved in Astro Pi, visit astro-pi.org for further information, deadlines, and more. If you would like to learn more about the other free resources we have available to help you inspire a coding community in your school, head to www.raspberrypi.org/teach.
Help us celebrate St Joseph’s Secondary School by sharing their story on X (formerly Twitter), LinkedIn, and Facebook.
I am delighted to announce that the Raspberry Pi Foundation and Google DeepMind are building a global network of educational organisations to bring AI literacy to teachers and students all over the world, starting with Canada, Kenya, and Romania.
Learners around the world will gain AI literacy skills through Experience AI.
Experience AI
We launched Experience AI in September 2022 to help teachers and students learn about AI technologies and how they are changing the world.
Developed by the Raspberry Pi Foundation and Google DeepMind, Experience AI provides everything that teachers need to confidently deliver engaging lessons that will inspire and educate young people about AI and the role that it could play in their lives.
Experience AI is designed to inspire learners about AI through real-world contexts.
We provide lesson plans, classroom resources, worksheets, hands-on activities, and videos that introduce a wide range of AI applications and the underlying technologies that make them work. The materials are designed to be relatable to young people and can be taught by any teacher, whether or not they have a technical background. Alongside the classroom resources, we provide teacher professional development, including an online course that provides an introduction to machine learning and AI.
Part of Experience AI are video interviews with AI developers at Google DeepMind.
The materials are grounded in real-world contexts and emphasise the potential for young people to positively change the world through a mastery of AI technologies.
Since launching the first resources, we have seen significant demand from teachers and students all over the world, with over 200,000 students already learning with Experience AI.
Experience AI network
Building on that initial success and in response to huge demand, we are now building a global network of educational organisations to expand the reach and impact of Experience AI by translating and localising the materials, promoting them to schools, and supporting teacher professional development.
Obum Ekeke OBE, Head of Education Partnerships at Google DeepMind, says:
“We have been blown away by the interest we have seen in Experience AI since its launch and are thrilled to be working with the Raspberry Pi Foundation and local partners to expand the reach of the programme. AI literacy is a critical skill in today’s world, but not every young person currently has access to relevant education and resources. By making AI education more inclusive, we can help young people make more informed decisions about using AI applications in their daily lives, and encourage safe and responsible use of the technology.”
Experience AI helps learners understand how they might use AI to positively change the world.
Today we are announcing the first three organisations that we are working with, each of which is already doing fantastic work to democratise digital skills in their part of the world. All three are already working in partnership with the Raspberry Pi Foundation and we are excited to be deepening and expanding our collaboration to include AI literacy.
Digital Moment, Canada
Digital Moment is a Montreal-based nonprofit focused on empowering young changemakers through digital skills. Founded in 2013, Digital Moment has a track record of supporting teachers and students across Canada to learn about computing, coding, and AI literacy, including through supporting one of the world’s largest networks of Code Clubs.
“We’re excited to be working with the Raspberry Pi Foundation and Google DeepMind to bring Experience AI to teachers across Canada. Since 2018, Digital Moment has been introducing rich training experiences and educational resources to make sure that Canadian teachers have the support to navigate the impacts of AI in education for their students. Through this partnership, we will be able to reach more teachers and with more resources, to keep up with the incredible pace and disruption of AI.”
Indra Kubicek, President, Digital Moment
Tech Kidz Africa, Kenya
Tech Kidz Africa is a Mobasa-based social enterprise that nurtures creativity in young people across Kenya through digital skills including coding, robotics, app and web development, and creative design thinking.
“With the retooling of teachers as a key objective of Tech Kidz Africa, working with Google DeepMind and the Raspberry Pi Foundation will enable us to build the capacity of educators to empower the 21st century learner, enhancing the teaching and learning experience to encourage innovation and prepare the next generation for the future of work.”
Grace Irungu, CEO, Tech Kidz Africa
Asociația Techsoup, Romania
Asociația Techsoup works with teachers and students across Romania and Moldova, training Computer Science, ICT, and primary school teachers to build their competencies around coding and technology. A longstanding partner of the Raspberry Pi Foundation, they foster a vibrant community of CoderDojos and support young people to participate in Coolest Projects and the European Astro Pi Challenge.
“We are enthusiastic about participating in this global partnership to bring high-quality AI education to all students, regardless of their background. Given the current exponential growth of AI tools and instruments in our daily lives, it is crucial to ensure that students and teachers everywhere comprehend and effectively utilise these tools to enhance their human, civic, and professional potential. Experience AI is the best available method for AI education for middle school students. We couldn’t be more thrilled to work with the Raspberry Pi Foundation and Google DeepMind to make it accessible in Romanian for teachers in Romania and the Republic of Moldova, and to assist teachers in fully integrating it into their classes.”
Elena Coman, Director of Development, Asociația Techsoup
Get involved
These are the first of what will become a global network of organisations supporting tens of thousands of teachers to equip millions of students with a foundational understanding of AI technologies through Experience AI. If you want to get involved in inspiring the next generation of AI leaders, we would love to hear from you.
Earlier this year, we launched our Code Editor, a free online tool to help make learning text-based programming simple and accessible for kids age 9 and up. We focus on supporting the needs of young people who are learning programming at school, in Code Clubs and CoderDojos, and at home.
Today, we have two exciting updates to share: support for web page projects with HTML/CSS, and an improved mobile and tablet experience.
What’s the Code Editor?
Learners can use the Code Editor to write and run code in a web browser without installing any additional software. The Editor is currently available as a beta version, and we’ve already received really positive comments:
“The Editor looks really nice! I have tried the Python part, and it is intuitive and concise. My little program worked no problem, and I am sure the Editor will be easy, intuitive, and quick to learn for the young [learners].”
— Volunteer in the CoderDojo community
Introducing HTML and CCS in the Code Editor
The Code Editor now supports the HTML and CSS web development languages, giving young people the ability to create and preview their own websites directly in the Editor interface. Learners can have their code and the preview panel side by side, and they can also preview their websites in a separate, larger tab.
We want the Code Editor to be safe, age-appropriate, and suitable for use in classrooms or coding clubs. With this in mind, we have excluded certain functions, like being able to add links to external websites in the code. Rather than enabling image uploads, we provide a library of images when projects in our free learning paths contain images, in order to support multimedia projects safely.
Whether users are coding in Python or HTML/CSS, the Editor offers accessibility options so you can easily switch settings between light and dark mode, and between small, medium, and large text size. The text size feature is useful for people with visual impairments, as well as for educators who want to demonstrate something to a group of learners.
Improved experience for mobile and tablet devices
Our Code Editor now offers a new and improved experience for users of mobile and tablet devices. This improves access for learners in classrooms where tablets are used, and in low- and middle-income countries, where mobile phones are commonly used for digital learning.
The Editor now includes:
A clearer and simpler navigation for small-screen devices
Separate Menu, Code and Output/Preview tabs
The same features on mobile/tablet devices as on desktop of laptop computers, such as responsive panels and the option to open HTML/CSS projects in a new tab
Try the Code Editor today
We’re continuing to develop the Code Editor and have more improvements planned. If you would like to try it out and provide us with your feedback, we’d love to hear what you think of our latest updates.
Code Editor developments have been made possible with generous support from Endless and the Cisco Foundation.
Young people can now learn to code and create with our brand-new path of micro:bit coding projects. The ‘Intro to micro:bit’ path is free and kids can follow it to code projects that focus on wellbeing, including topics like mental health, relaxation, and exercise.
As you might know, a micro:bit (pronounced “microbit”) is a small, programmable device designed for education. You can program it using any computer. It’s easy to use and learn with, and suitable for beginners, especially young people in and out of school.
The theme of the new project path: Wellbeing
Our aim for this new micro:bit project path is to help young people explore how they can create their own tech tools that help them look after themselves and others. By designing the micro:bit coding projects around wellbeing, we want to not only help kids develop programming and digital literacy skills, but also promote open conversations about the important topic of mental health.
Credit: David Bird
The six micro:bit coding projects in our new path all cover different aspects of wellbeing in a fun, creative way:
Good sleep patterns
Relaxation
Self-confidence
Happiness
Health
Entertainment
We hope that following the path and making projects helps encourage learners to ask questions, share their experiences, and feel like they can ask parents, teachers, or mentors for support, and help support their friends and peers.
What is in the ‘Intro to micro:bit’ project path?
The ‘Intro to micro:bit’ path is designed according to our Digital Making Framework. Its aim is to encourage young people to become independent coders and tech creators as they progress along the projects in a path by gently removing scaffolding.
Our project paths begin with three Explore projects, in which learners are guided through tasks that introduce them to new coding skills.
Next, learners complete two Design projects. Here, they are encouraged to practise their skills and bring in their own interests to personalise their coding creations.
Finally, learners complete one Invent project. This is where they put everything that they have learned together and create something unique that matters to them.
The structure of the path means that learners are led through the development process of a coding project and learn how to turn their ideas into reality. The path structure also supports them with fixing programming errors (debugging), showing them that errors are a normal part of computer programming and just temporary setbacks that they can overcome.
Credit: David Bird
Because community is important for learning, the path also offers young people the chance to share the projects they make with peers around the world.
What coding skills and knowledge will young people learn?
The Explore projects at the start of the path are where the initial learning takes place. Learners then develop their new skills and knowledge by putting them into practice in the Design and Invent projects, where they add in their own ideas and creativity.
The key programming concepts covered in this path are:
Variables
Using selection (if, else if, and else)
Using repetition (for loops)
Using randomisation
Using functions
Credit: David Bird
There are two versions of the micro:bit (V1 and V2) and learners can use either version to create the micro:bit coding projects in the path, using the micro:bit’s input and output features:
Input features:
Buttons
Accelerometer
Sound sensor/microphone (micro:bit V2 only)
Capacitive touch sensor
Light sensor
Output features:
LED display
Speaker
Headphones connected via GPIO (micro:bit V1 only)
Explore project 1: Music player
In this Explore project, kids create a music player on the micro:bit to explore how listening to music can improve their mood. While creating their music player, young people get to choose melodies that they enjoy or that make them feel more relaxed. They also add a range of functions such as pausing, skipping, and shuffling tracks.
Explore project 2: Sound level meter
Noise levels can affect people’s well-being, so in this project, kids create a program to use the micro:bit to display how noisy their environment is. They will also learn how to save the noise data the micro:bit measures so they can identify the noisiest times in their day.
Explore project 3: Sleep tracker
Sleep is an important factor that contributes towards well-being. With this third Explore project, kids create a program to track their sleep movements using the micro:bit. This teaches them about variables and about using the micro:bit’s accelerometer, and its LEDs to display data.
Design project 1: How’s your day?
The first Design project of the path gets young people to build a mood checker program using the question ‘How’s your day?’. Kids get creative design control over the mood checker’s outputs according to the user’s replies, including displaying an animation or positive messages, or playing music. Kids can also make use of sensors to measure the various factors in the environment that could be affecting the user’s mood.
In this project, young people apply all of the coding skills and knowledge covered in the Explore projects, including selection, repetition, variables, functions, and randomisation.
Design project 2: Active assistant
In the second Design project, young people create an assistant that helps them get active.The project provides examples, a structure, and brief summaries of what kids have learned to do on the path so far to inspire and motivate them. This mean young people can work independently to produce their own outcomes and the functionality of their assistant is up to each young tech creator.
Invent project: Party game
The final project, Party game, encourages learners to independently replicate their favourite party game for entertainment and relaxation. Learners will combine all of the knowledge and skills they’ve gained throughout the path to make something of their own around the theme of well-being. This is a chance for them to unleash their creativity and reflect on real-life games they enjoy. The outcome will be unique, and fun for them to share with their friends and family.
Key questions answered
Who is this path for?
We have written these micro:bit coding projects with young people around the age of 6 to 13 in mind. Building the projects on the path does not require any previous coding experience, although complete beginners may want to try our free ‘Intro to Scratch’ path first.
What software do learners need to code these projects?
A web browser on a computer. In every project, starter code is provided in the MakeCode online code editor. Learners can either download their project code to a physical micro:bit (recommended) or use the micro:bit simulator in MakeCode.
Credit: David Bird
Young people who live where there isn’t constant internet connectivity can also download the offline version of the MakeCode editor. There are also free micro:bit coding apps for smartphones and tablets.
How long will the path take to complete?
We’ve designed the ‘Intro to micro:bit’ path to be completed in six one-hour sessions, with one hour per project. However, the project instructions invite learners to take additional time to upgrade their projects if they wish.
What can learners do next?
Take part in Coolest Projects
At the end of the micro:bit path, learners are encouraged to register a project they’re making with their new coding skills for Coolest Projects, our annual online technology showcase for young people around the world.
Taking part is free, and beginners as well as more experienced young tech creators are invited. This is their opportunity to share their ingenuity in an online gallery for the world and the Coolest Projects community to celebrate.
Today we’re calling all young people who are excited to explore coding and space science, and the mentors who want to support and inspire them on their journey. Astro Pi Mission Space Lab is officially open again, offering young people all over Europe the amazing chance to have their code for a science experiment run in space on the International Space Station (ISS).
Aurora Borealis as seen from the ISS
With this year’s Mission Space Lab, astronauts from the European Space Agency are setting young people a task: to write a computer program that runs on the ISS and calculates the speed at which the ISS is orbiting planet Earth. Participation in Mission Space Lab is completely free.
Here’s ESA astronaut candidate Rosemary Coogan to introduce this year’s mission:
The mission: Calculate the speed of the ISS
Mission Space Lab invites young people up to age 19 to work in teams of 2 to 6 and write a Python program for the Astro Pi computers on board the ISS to collect data and calculate the speed at which the ISS is travelling.
Your role as a mentor is to support teams as they design and create their program — with our free guidance resources to help you and your young creators.
We want as many young people as possible to have the chance to take part in Mission Space Lab, so the way in which teams solve the task set by the ESA astronauts can be different depending on the experience of your team:
Beginner programmers can follow the guided project we provide (more info below) to write their program.
Teams with more programming experience can get creative to come up with their own innovative solution and calculate the speed of the ISS as accurately as possible.
The Astro Pis are two Raspberry Pi computers stationed on the ISS, each equipped with a High Quality Camera, a Sense HAT add-on board with a number of sensors, and a Coral machine learning accelerator. Each Astro Pi has a hard casing designed especially for space travel.
The Astro Pi computers inside the International Space Station.
There are lots of ways to use sensor data from the Astro Pis to calculate the speed of the ISS, so young people can get creative solving their Mission Space Lab task while learning fascinating facts about physics and the inner workings of the ISS.
All Mission Space Lab participants whose programs run on the ISS will receive a certificate recognising their achievement, and they’ll get the chance to attend a Q&A webinar with an ESA astronaut. Teams also receive back data from the ISS based on their Mission Space Lab programs, for example photos or sensor measurements. That means you’ll have the option to explore and use that data in follow-on activities with your young people.
The coastline of Chile photographed by an Astro Pi on the ISS
Support for you to get started with Mission Space Lab
We are providing lots of supporting materials to help you and your team with Mission Space Lab:
A new Mission Space Lab mentor guide helps you assemble and support teams of young people who want to take part. It gives you as a mentor everything you need to answer your team’s questions and help them solve problems. It also includes tips on how to structure the Mission for your team. So young and your young people can make the most of Mission Space Lab, we suggest you run a series of sessions where your team can learn about the ISS, think about how they could use the different Astro Pi sensors, and design and create a program. The guide shows you how to help them use a design thinking approach during the Mission and develop problem solving and collaboration skills that are very important for careers in tech.
The Mission Space Lab creator guidehelps young people design and create their Python programs. It contains all of the information they need to write a program that can be run on the Astro Pis. It includes discussion points for the team’s planning and design process. The technical instructions support young people to create a program that accomplishes its goal in the allocated runtime of 10 minutes.
We’re also providing a ISS speed project guidethat shows one way for teams to complete the Mission Space Lab task: writing a program that calculates the ISS speed using photos taken by the Astro Pi’s camera.
Mission Space Lab is open for submissions from today, 6 November 2023, until 19 February 2024.
We are pleased to announce a new AI-themed challenge for young people: the Experience AI Challenge invites and supports young people aged up to 18 to design and make their own AI applications. This is their chance to have a taste of getting creative with the powerful technology of machine learning. And equally exciting: every young creator will get feedback and encouragement from us at the Raspberry Pi Foundation.
As you may have heard, we recently launched a series of classroom lessons called Experience AI in partnership with Google DeepMind. The lesson materials make it easy for teachers of all subjects to teach their learners aged up to 18 about artificial intelligence and machine learning. Now the Experience AI Challenge gives young people the opportunity to develop their skills further and build their own AI applications.
Key information
Starts on 08 January 2024
Free to take part in
Designed for beginners, based on the tools Scratch and Machine Learning for Kids
Open for official submissions made by UK-based young people aged up to 18 and their mentors
Young people and their mentors around the world are welcome to access the Challenge resources and make AI projects
Tailored resources for young people and mentors to support you to take part
For the Experience AI Challenge, you and the young people you work with will learn how to make a machine learning (ML) classifier that organises data types such as audio, text, or images into different groupings that you specify.
The Challenge resources show young people the basic principles of using the tools and training ML models. Then they will use these new skills to create their own projects, and it’s a chance for their imaginations to run free. Here are some examples of projects your young tech creators could make:
An instrument classifier to identify the type of musical instrument being played in pieces of music
An animal sound identifier to determine which animal is making a particular sound
A voice command recogniser to detect voice commands like ‘stop’, ‘go’, ‘left’, and ‘right’
A photo classifier to identify what kind of food is shown in a photograph
All creators will receive expert feedback on their projects.
To make the Experience AI Challenge as familiar and accessible as possible for young people who may be new to coding, we designed it for beginners. We chose the free, easy-to-use, online tool Machine Learning for Kids for young people to train their machine learning models, and Scratch as the programming environment for creators to code their projects. If you haven’t used these tools before, don’t worry. The Challenge resources will provide all the support you need to get up to speed.
Training an ML model and creating a project with it teaches many skills beyond coding, including computational thinking, ethical programming, data literacy, and developing a broader understanding of the influence of AI on society.
The three Challenge stages
Our resources for creators and mentors walk you through the three stages of the Experience AI Challenge.
Stage 1: Explore and discover
The first stage of the Challenge is designed to ignite young people’s curiosity. Through our resources, mentors let participants explore the world of AI and ML and discover how these technologies are revolutionising industries like healthcare and entertainment.
Stage 2: Get hands-on
In the second stage, young people choose a data type and embark on a guided example project. They create a training dataset, train an ML model, and develop a Scratch application as the user interface for their model.
Stage 3: Design and create
In the final stage, mentors support young people to apply what they’ve learned to create their own ML project that addresses a problem they’re passionate about. They submit their projects to us online and receive feedback from our expert panel.
On September 29 2023, amidst much excitement and enthusiasm, a significant event took place at a unique school in Moinabad, Telangana: the teams of the Raspberry Pi Foundation and Telangana Social Welfare Residential Educational Institutions Society (TSWREIS) gathered to celebrate our partnership on the esteemed Coding Academy of TSWREIS.
This event marked a special project for us where we are piloting a distinctive, progression-based computing curriculum in a government school and a degree college in India.
Partnering with TSWREIS to bring computing education to Telangana
At the Foundation, our goal is to work closely with schools, tailoring our offerings to their contexts. Our objective is to design and evaluate unique learning experiences by integrating content from our diverse range of high-quality educational products. Through these efforts, we aim to drive significant advancements in education and technology, benefiting both students and education systems across the world.
TSWREIS manages 268 residential educational institutions in Telangana, with a primary focus on delivering quality education to under-resourced young people, particularly children from scheduled castes and tribes in rural areas. Among these institutions is the Coding Academy school, located in Moinabad, which operates as a fully residential co-ed school for grades 6 to 12, accommodating around 800 students. Additionally, TSWREIS oversees another centre of excellence, the Coding Academy degree college in Shamirpet catering to 600 undergraduate female students.
We joined forces with TSWREIS to form a collaborative partnership with their Coding Academy units at both high school and college. We’re committed to sharing our expertise in computing and coding curriculum for students from Grade 6 to intermediate at the school, and across all courses at the college.
The exciting model for our partnership with TSWREIS
We took on the challenge of directly delivering a comprehensive curriculum at the Coding Academy school and college through our own educators, exclusively hired and trained for this project. This is an exciting new approach for us, because up to this point, we have never directly delivered a curriculum anywhere in the world. However, we know we have created a world-class computing curriculum for educators in formal (and non-formal) settings, and we have many years’ experience of training teachers, so we are well-prepared to face this project and its potential challenges head-on and make it a success.
To begin the project, our team members based in India conducted a thorough study of the Coding Academy students’ interests and learning levels. Based on this, our Curriculum team in the UK and India customised and localised the content in our curriculum. We will be observing the curriculum’s delivery in classrooms and collecting students’ responses, and based on this data we’ll further refine the localised curriculum.
Throughout the project’s lifespan, we’ll measure the effectiveness of our curriculum and the impact of learning on the students. To do this, we’ll collect data from classroom observations, periodic assessments, and focused group discussions with students and educators.
Starting from the second year of the project, we will build capacity within the system. In collaboration with TSWREIS, we’ll select teachers from within the organisation based on their interest and competence, and initiate their training. Our objective is that by the project’s fifth year, TSWREIS will have achieved self-sufficiency in delivering computing education to students at the Coding Academy as well as other institutions in its purview.
The promise of this project for our work in India
We began delivering lessons at the Coding Academy college and school in July, and it’s worth mentioning that it’s been a rollercoaster ride so far. We’ve been working closely with the TSWREIS team to equip both the academic units with the resources needed for seamless implementation of the project. Our India-based team has been able to ensure continuity in the project’s momentum and plug every gap, and is working tirelessly to make this big, challenging, and exciting project blossom and succeed. When it comes to the students’ energy, enthusiasm, and the sparkle in their eyes for their learning, it’s unmatched, and everyone feels proud of their achievements so far.
This work with TSWREIS holds immense importance for us, representing our dedication to shaping a brighter educational landscape especially for young people from under-resourced communities. We hope to replicate similar initiatives across various regions in India, enabling widespread access to quality education. We also aspire to take forward our initiatives in much larger dimensions for the entirety of India.
In addition to our partnership with TSWREIS, we are actively engaged in several other impactful projects in India, such as our partnership with Mo School Abhiyan in Odisha to serve the government’s schools across Odisha state, and our collaboration with Pratham Foundation, which is helping us reach under-resourced communities and furthering our commitment to enhancing educational experiences.
We look towards the future
In reflection, the voices at the launch event on September 29 echoed the anticipation and optimism that filled the air on that memorable day. Chief guests who graciously attended the event were Shri. E Naveen Nicholas, IAS, Secretary at TSWREIS & TTWREIS, and Rachel Bennett, our Managing Director at the Raspberry Pi Foundation. Heartfelt gratitude to them for their presence and blessings. We also extend our thanks to our funding partner in this work, Ezrah Charitable Trust, and our delivery partners for their invaluable support.
The energy felt on the event day continues to drive our determination to do the work that lies ahead. As we look forward to the future, our hope and the hope of both the Coding Academy team and students are aligned: hope for a brighter, technologically empowered future, where education becomes a beacon of opportunity for all.
Increasing access to computing education is a global challenge, and at the Raspberry Pi Foundation we take a global approach in addressing it. One way we do this is to partner with organisations around the world and support them to introduce Code Clubs and CoderDojos in their local or national communities.
Code Club and CoderDojo are the two global networks of free, volunteer-led coding clubs for young people that we support. They are a great fit for a lot of organisations that share our vision and values and work with young people from backgrounds that are currently under-represented in computing. Right now, our Global Clubs Partner network involves more than 50 organisations in over 40 different countries around the world. Seven new partners have joined us since August.
New members in the Global Clubs Partner network
We send a warm welcome to our seven new partners. Here is some of what they are working on:
CSEd Botswana is training 25 teachers in rural areas to run Code Clubs in their schools
Hacedores in Mexico is working towards establishing CoderDojos in their 80 makerspaces, and Code Clubs in the local schools of their community members.
Code Club Luxembourg is already running several clubs and also hosts a number of workshops each year to encourage children to carry on their coding journey by joining a Code Club or CoderDojo.
Light Into Europe works with the Deaf community in Romania. They plan to open up coding to children with hearing impairments through accessible Code Clubs, supported by interpreters and adults who are also deaf.
KIT Hub in Burundi have plans to establish CoderDojos to support children from underserved areas, including a sizable community of Congolese young people living in refugee camps in Burundi.
Orientations Training Centre in Sudan will be setting up clubs in Khartoum and Darfur, and they are planning a special passion for supporting young people to submit entries to the Coolest Projects online showcase in 2024.
Savanna Developer Network will establish CoderDojos in northern Ghana to narrow the income and infrastructure gap between the north and the south by ensuring that children in the north aren’t left behind in computing education.
We are really excited that these organisations have chosen to join the Global Clubs Partner network.
Benefits of partnering with us
When they join our Global Clubs Partner network, organisations work with us to grow the Code Club and CoderDojo communities around the world. Our Global Clubs Partners share our mission to enable young people to realise their full potential through the power of computing and digital technologies, and they commit to working towards this mission with our support.
Our new partners are as glad as we are to have joined our network.
Abdelmoneim Mohammed of Orientations Training Centre in Sudan is excited by the impact Code Club will have on his young coders, telling us:
I expect this can help to make our citizens a global citizen, [by] learning from a well-established and developed educational system.
For Ethel Tshukudu of CSEd Botswana, it is the community focus and available support network that is important. She tells us:
The strong sense of community and the availability of mentorship opportunities are particularly appealing, as they ensure that CSEdBotswana can consistently access the support needed to enhance our coding clubs and create a more significant impact.
Our partner from KIT Hub in Burundi, Ferdinand Alimasi, values how establishing clubs promotes collective learning and engagement in the community. He says:
Education and preparation of [the] future workforce require collective work and responsibilities, so these clubs will bring the change in communities by offering opportunities to learn for kids and teens, as well as opportunities for everyone to be involved in building a better future for all.
What we learn from our partnerships
Our partners work in lots of different circumstances all around the world. A key learning for us is that there is no ‘one size fits all’ approach to computing education. We support our partners to adapt and deliver our resources in a way that they know will best engage their learners. This highlights how important it is to work in a culturally sensitive way, and to prioritise providing opportunities for learners to use digital technology to make things that matter to them. That looks very different depending on where you are in the world, and who you are working with.
Through working with our partners, we also see just how much world events can impact the already unequal access young people have to learning new digital skills. Climate crisis events such as floods and wildfires, and political crises such as war, conflict, and changes in government have affected many of our global partners this year. The resulting closures of schools and other educational venues, electricity blackouts, and funding challenges cause further educational disadvantage to the children in the affected areas. Our partners play a key role in providing additional educational opportunities for young people when it is safe to do so.
Young tech creators at a Code Club in Brazil.
The experiences and perspectives we’ve gained through our partnerships with global organisations are extremely important to us and our mission. They help to inform the work we do to make computing education truly accessible for all learners and educators around the globe.
Could your organisation become a Global Clubs Partner?
You can find out more about how your organisation could join our Global Clubs Partner network on the CoderDojo and Code Club websites, or contact us directly with your questions or ideas about a partnership.
Recent developments in artificial intelligence are changing how the world sees computing and challenging computing educators to rethink their approach to teaching. In the brand-new issue of Hello World, out today for free, we tackle some big questions about AI and computing education. We also get practical with resources for your classroom.
Teaching and AI
In their articles for issue 22, educators explore a range of topics related to teaching and AI, including what is AI literacy and how do we teach it; gender bias in AI and what we can do about it; how to speak to young children about AI; and why anthropomorphism hinders learners’ understanding of AI.
Our feature articles also include a research digest on AI ethics for children, and of course hands-on examples of AI lessons for your learners.
A snapshot of AI education
Hello World issue 22 is a comprehensive snapshot of the current landscape of AI education. Ben Garside, Learning Manager for our Experience AI programme and guest editor of this issue, says:
“When I was teaching in the classroom, I used to enjoy getting to grips with new technological advances and finding ways in which I could bring them into school and excite the students I taught. Occasionally, during the busiest of times, I’d also look longingly at other subjects and be jealous that their curriculum appeared to be more static than ours (probably a huge misconception on my behalf).”
It’s inspiring for me to see how the education community is reacting to the opportunities that AI can provide.
Ben Garside
“It’s inspiring for me to see how the education community is reacting to the opportunities that AI can provide. Of course, there are elements of AI where we need to tread carefully and be very cautious in our approach, but what you’ll see in this magazine is educators who are thinking creatively in this space.”
Download Hello World issue 22 for free
AI is a topic we’ve addressed before in Hello World, and we’ll keep covering this rapidly evolving area in future. We hope this issue gives you plenty of ideas to take away and build upon.
Also in issue 22:
Vocational training for young people
Making the most of online educator training
News about BBC micro:bit
An insight into the WiPSCE 2023 conference for teachers and educators
And much, much more
You can download your free PDF issue now, or purchase a print copy from our store. UK-based subscribers for a free print edition can expect their copies to arrive in the mail this week.
Send us a message or tag us on social media to let us know which articles have made you think and, most importantly, which will help you with your teaching.
It’s been less than a year since ChatGPT catapulted generative artificial intelligence (AI) into mainstream public consciousness, reigniting the debate about the role that these powerful new technologies will play in all of our futures.
‘Will AI save or destroy humanity?’ might seem like an extreme title for a podcast, particularly if you’ve played with these products and enjoyed some of their obvious limitations. The reality is that we are still at the foothills of what AI technology can achieve (think World Wide Web in the 1990s), and lots of credible people are predicting an astonishing pace of progress over the next few years, promising the radical transformation of almost every aspect of our lives. Comparisons with the Industrial Revolution abound.
At the same time, there are those saying it’s all moving too fast; that regulation isn’t keeping pace with innovation. One of the UK’s leading AI entrepreneurs, Mustafa Suleyman, said recently: “If you don’t start from a position of fear, you probably aren’t paying attention.”
What is AI literacy for young people?
What does all this mean for education, and particularly for computing education? Is there any point trying to teach children about AI when it is all changing so fast? Does anyone need to learn to code anymore? Will teachers be replaced by chatbots? Is assessment as we know it broken?
If we’re going to seriously engage with these questions, we need to understand that we’re talking about three different things:
AI literacy: What it is and how we teach it
Rethinking computer science (and possibly some other subjects)
Enhancing teaching and learning through AI-powered technologies
AI literacy: What it is and how we teach it
For young people to thrive in a world that is being transformed by AI systems, they need to understand these technologies and the role they could play in their lives.
Our SEAME model articulates the concepts, knowledge, and skills that are essential ingredients of any AI literacy curriculum.
The first problem is defining what AI literacy actually means. What are the concepts, knowledge, and skills that it would be useful for a young person to learn?
The reality is that — with a few notable exceptions — the vast majority of AI literacy resources available today are probably doing more harm than good.
In the past couple of years there has been a huge explosion in resources that claim to help young people develop AI literacy. Our research team mapped and categorised over 500 resources, and undertaken a systematic literature review to understand what research has been done on K–12 AI classroom interventions (spoiler: not much).
The reality is that — with a few notable exceptions — the vast majority of AI literacy resources available today are probably doing more harm than good. For example, in an attempt to be accessible and fun, many materials anthropomorphise AI systems, using human terms to describe them and their functions and thereby perpetuating misconceptions about what AI systems are and how they work.
What emerged from this work at the Raspberry Pi Foundation is the SEAME model, which articulates the concepts, knowledge, and skills that are essential ingredients of any AI literacy curriculum. It separates out the social and ethical, application, model, and engine levels of AI systems — all of which are important — and gets specific about age-appropriate learning outcomes for each.
This research has formed the basis of Experience AI (experience-ai.org), a suite of resources, lessons plans, videos, and interactive learning experiences created by the Raspberry Pi Foundation in partnership with Google DeepMind, which is already being used in thousands of classrooms.
If we’re serious about AI literacy for young people, we have to get serious about AI literacy for teachers.
Defining AI literacy and developing resources is part of the challenge, but that doesn’t solve the problem of how we get them into the hands and minds of every young person. This will require policy change. We need governments and education system leaders to grasp that a foundational understanding of AI technologies is essential for creating economic opportunity, ensuring that young people have the mindsets to engage positively with technological change, and avoiding a widening of the digital divide. We’ve messed this up before with digital skills. Let’s not do it again.
Teacher professional development is key to AI literacy for young people.
More than anything, we need to invest in teachers and their professional development. While there are some fantastic computing teachers with computer science qualifications, the reality is that most of the computing lessons taught anywhere on the planet are taught by a non-specialist teacher. That is even more so the case for anything related to AI. If we’re serious about AI literacy for young people, we have to get serious about AI literacy for teachers.
Rethinking computer science
Alongside introducing AI literacy, we also need to take a hard look at computer science. At the very least, we need to make sure that computer science curricula include machine learning models, explaining how they constitute a new paradigm for computing, and give more emphasis to the role that data will play in the future of computing. Adding anything new to an already packed computer science curriculum means tough choices about what to deprioritise to make space.
One of our Experience AI Lessons revolves around the us of AI technology to study the Serengeti ecosystem.
And, while we’re reviewing curricula, what about biology, geography, or any of the other subjects that are just as likely to be revolutionised by big data and AI? As part of Experience AI, we are launching some of the first lessons focusing on ecosystems and AI, which we think should be at the heart of any modern biology curriculum.
Some are saying young people don’t need to learn how to code. It’s an easy political soundbite, but it just doesn’t stand up to serious scrutiny.
There is already a lively debate about the extent to which the new generation of AI technologies will make programming as we know it obsolete. In January, the prestigious ACM journal ran an opinion piece from Matt Welsh, founder of an AI-powered programming start-up, in which he said: “I believe the conventional idea of ‘writing a program’ is headed for extinction, and indeed, for all but very specialised applications, most software, as we know it, will be replaced by AI systems that are trained rather than programmed.”
Writing computer programs is an essential part of learning how to analyse problems in computational terms.
With GitHub (now part of Microsoft) claiming that their pair programming technology, Copilot, is now writing 46 percent of developers’ code, it’s perhaps not surprising that some are saying young people don’t need to learn how to code. It’s an easy political soundbite, but it just doesn’t stand up to serious scrutiny.
Even if AI systems can improve to the point where they generate consistently reliable code, it seems to me that it is just as likely that this will increase the demand for more complex software, leading to greater demand for more programmers. There is historical precedent for this: the invention of abstract programming languages such as Python dramatically simplified the act of humans providing instructions to computers, leading to more complex software and a much greater demand for developers.
Learning to program will help young people understand how the world around them is being transformed by AI systems.
However these AI-powered tools develop, it will still be essential for young people to learn the fundamentals of programming and to get hands-on experience of writing code as part of any credible computer science course. Practical experience of writing computer programs is an essential part of learning how to analyse problems in computational terms; it brings the subject to life; it will help young people understand how the world around them is being transformed by AI systems; and it will ensure that they are able to shape that future, rather than it being something that is done to them.
Enhancing teaching and learning through AI-powered technologies
Technology has already transformed learning. YouTube is probably the most important educational innovation of the past 20 years, democratising both the creation and consumption of learning resources. Khan Academy, meanwhile, integrated video instruction into a learning experience that gamified formative assessment. Our own edtech platform, Ada Computer Science, combines comprehensive instructional materials, a huge bank of questions designed to help learning, and automated marking and feedback to make computer science easier to teach and learn. Brilliant though these are, none of them have even begun to harness the potential of AI systems like large language models (LLMs).
The challenge for all of us working in education is how we ensure that ethics and privacy are at the centre of the development of [AI-powered edtech].
One area where I think we’ll see huge progress is feedback. It’s well-established that good-quality feedback makes a huge difference to learning, but a teacher’s ability to provide feedback is limited by their time. No one is seriously claiming that chatbots will replace teachers, but — if we can get the quality right — LLM applications could provide every child with unlimited, on-demand feedback. AI-powered feedback — not giving students the answers, but coaching, suggesting, and encouraging in the way that great teachers already do — could be transformational.
The challenge for all of us working in education is how we ensure that ethics and privacy are at the centre of the development of AI-powered edtech.
We are already seeing edtech companies racing to bring new products and features to market that leverage LLMs, and my prediction is that the pace of that innovation is going to increase exponentially over the coming years. The challenge for all of us working in education is how we ensure that ethics and privacy are at the centre of the development of these technologies. That’s important for all applications of AI, but especially so in education, where these systems will be unleashed directly on young people. How much data from students will an AI system need to access? Can that data — aggregated from millions of students — be used to train new models? How can we communicate transparently the limitations of the information provided back to students?
Ultimately, we need to think about how parents, teachers, and education systems (the purchasers of edtech products) will be able to make informed choices about what to put in front of students. Standards will have an important role to play here, and I think we should be exploring ideas such as an AI kitemark for edtech products that communicate whether they meet a set of standards around bias, transparency, and privacy.
Realising potential in a brave new world
We may very well be entering an era in which AI systems dramatically enhance the creativity and productivity of humanity as a species. Whether the reality lives up to the hype or not, AI systems are undoubtedly going to be a big part of all of our futures, and we urgently need to figure out what that means for education, and what skills, knowledge, and mindsets young people need to develop in order to realise their full potential in that brave new world.
That’s the work we’re engaged in at the Raspberry Pi Foundation, working in partnership with individuals and organisations from across industry, government, education, and civil society.
If you have ideas and want to get involved in shaping the future of computing education, we’d love to hear from you.
This article will also appear in issue 22 of Hello World magazine, which focuses on teaching and AI. We are publishing this new issue on Monday 23 October. Sign up for a free digital subscription to get the PDF straight to your inbox on the day.
Block-based programming applications like Scratch and ScratchJr provide millions of children with an introduction to programming; they are a fun and accessible way for beginners to explore programming concepts and start making with code. ScratchJr, in particular, is designed specifically for children between the ages of 5 and 7, enabling them to create their own interactive stories and games. So it’s no surprise that they are popular tools for primary-level (K–5) computing teachers and learners. But how can teachers assess coding projects built in ScratchJr, where the possibilities are many and children are invited to follow their imagination?
Aim Unahalekhala
In the latest seminar of our series on computing education for primary-aged children, attendees heard about two research studies that explore the use of ScratchJr in K–2 education. The speaker, Apittha (Aim) Unahalekhala, is a graduate researcher at the DevTech Research Group at Tufts University. The two studies looked at assessing young children’s ScratchJr coding projects and understanding how they create projects. Both of the studies were part of the Coding as Another Language project, which sees computer science as a new literacy for the 21st century, and is developing a literacy-based coding curriculum for K–2.
How to evaluate children’s ScratchJr projects
ScratchJr offers children 28 blocks to choose from when creating a coding project. Some of these are simple, such as blocks that determine the look of a character or setting, while others are more complex, such as messaging blocks and loops. Children can combine the blocks in many different ways to create projects of different levels of complexity.
Selecting blocks for a ScratchJr project
At the start of her presentation, Aim described a rubric that she and her colleagues at DevTech have developed to assess three key aspects of a ScratchJr coding project. These aspects are coding concepts, project design, and purposefulness.
The rubric lets educators or researchers:
Assess learners’ ability to use their coding knowledge to create purposeful and creative ScratchJr projects
Identify the level of mastery of each of the three key aspects demonstrated within the project
Identify where learners might need more guidance and support
The elements covered by the ScratchJr project evaluation rubric. Click to enlarge.
As part of the study, Aim and her colleagues collected coding projects from two schools at the start, middle, and end of a curriculum unit. They used the rubric to evaluate the coding projects and found that project scores increased over the course of the unit.
They also found that, overall, the scores for the project design elements were higher than those for coding concepts: many learners enjoyed spending lots of time designing their characters and settings, but made less use of other features. However, the two scores were correlated, meaning that learners who devoted a lot of time to the design of their project also got higher scores on coding concepts.
The rubric is a useful tool for any teachers using ScratchJr with their students. If you want to try it in your classroom, the validated rubric is free to download from the DevTech research group’s website.
How do young children create a project?
The rubric assesses the output created by a learner using ScratchJr. But learning is a process, not just an end outcome, and the final project might not always be an accurate reflection of a child’s understanding.
By understanding more about how young children create coding projects, we can improve teaching and curriculum design for early childhood computing education.
In the second study Aim presented, she set out to explore this question. She conducted a qualitative observation of children as they created coding projects at different stages of a curriculum unit, and used Google Analytics data to conduct a quantitative analysis of the steps the children took.
A project creation process involving iteration
Her findings highlighted the importance of encouraging young learners to explore the full variety of blocks available, both by guiding them in how to find and use different blocks, and by giving them the time and tools they need to explore on their own.
She also found that different teaching strategies are needed at different stages of the curriculum unit to support learners. This helps them to develop their understanding of both basic and advanced blocks, and to explore, customise, and iterate their projects.
Early-unit strategy:
Encourage free play to self-discover different functions, especially basic blocks
Mid-unit strategy:
Set plans on how long children will need on customising vs coding
More guidance on the advanced blocks, then let children explore
End-of-unit strategy:
Provide multiple sessions to work
Promote iteration by encouraging children to keep improving code and adding details
Teaching strategies for different stages of the curriculum
Join our next seminar on primary computing education
At our next seminar, we welcome Aman Yadav (Michigan State University), who will present research on computational thinking in primary school. The session will take place online on Tuesday 7 November at 17:00 UK time. Don’t miss out and sign up now:
The UK Bebras Challenge is back and ready to accept entries from schools for its annual event, which runs from 6 to 17 November.
More than 3 million students from 59 countries took part in the Bebras Computational Thinking Challenge in 2022. In the UK alone, over 365,000 students participated. Read on to find out how you can get your school involved.
“This is now an annual event for our Year 5 and 6 students, and one of the things I actually love about it is the results are not always what you might predict. There are children who have a clear aptitude for these puzzles who find this is their opportunity to shine!”
Bebras is a free, annual challenge that helps schools introduce computational thinking to their students. No programming is involved, and it’s completely free for schools to enter. All Bebras questions are self-marking.
We’re making Bebras accessible by offering age-appropriate challenges for different school levels and a challenge tailored for visually impaired students. Schools can enter students from age 6 to 18 and know they’ll get interesting and challenging (but not too challenging) activities.
The winners of the Oxford University Computing Challenge 2023, with Professor Peter Millican at the OUCC Prize Day in the Raspberry Pi Foundation office.
What is the thinking behind Bebras?
We want young people to get excited about computing. Through Bebras, they will learn about computational and logical thinking by answering questions and solving problems.
Bebras questions are based on classic computing problems and are presented in a friendly, age-appropriate way. For example, an algorithm-based puzzle for learners aged 6 to 8 is presented in terms of a hungry tortoise finding an efficient eating path across a lawn; for 16- to 18-year-olds, a difficult problem based on graph theory asks students to sort out quiz teams by linking quizzers who know each other.
“This has been a really positive experience. Thank you. Shared results with Head and Head of Key Stage 3. Really useful for me when assessing Key Stage 4 options.”
– Secondary teacher, North Yorkshire
Can you solve our example Bebras puzzle?
Here’s a Bebras question for the Castors category (ages 8 to 10) from 2021. You will find the answer at the end of this blog.
Cleaning
A robot picks up litter.
The robot moves to the closest piece of litter and picks it up.
It then moves to the next closest piece of litter and picks it up.
It carries on in this way until all the litter has been picked up.
Question: Which kind of litter will the robot pick up last?
How do I get my school involved in Bebras?
The Bebras challenge for UK schools takes place from 6 to 17 November. Register at bebras.uk/admin to get free access to the challenge.
By registering, you also get access to the Bebras back catalogue of questions, from which you can build your own quizzes to use in your school at any time during the year. All the quizzes are self-marking, and you can download your students’ results for your mark book. Schools have reported using these questions for end-of-term activities, lesson starters, and schemes of lessons about computational thinking.
Puzzle answer
The answer to the example puzzle is:
The image below shows the route the robot takes by following the instructions: